系统报告:罗切斯特药物合作社
罗切斯特药品合作公司(Rochester Drug Cooperative)是一个早期采用者,正在使用机器人拣货技术来补充拣货速度慢的物品。

地点:罗彻斯特,纽约
大小:6万平方英尺加上1.9万平方英尺的夹层
产品:药品和非处方药
吞吐量:每晚15000行
每天轮班/每周轮班天数:每天2班/每周6天
员工:45
点击这里阅读完整的RDC系统报告。
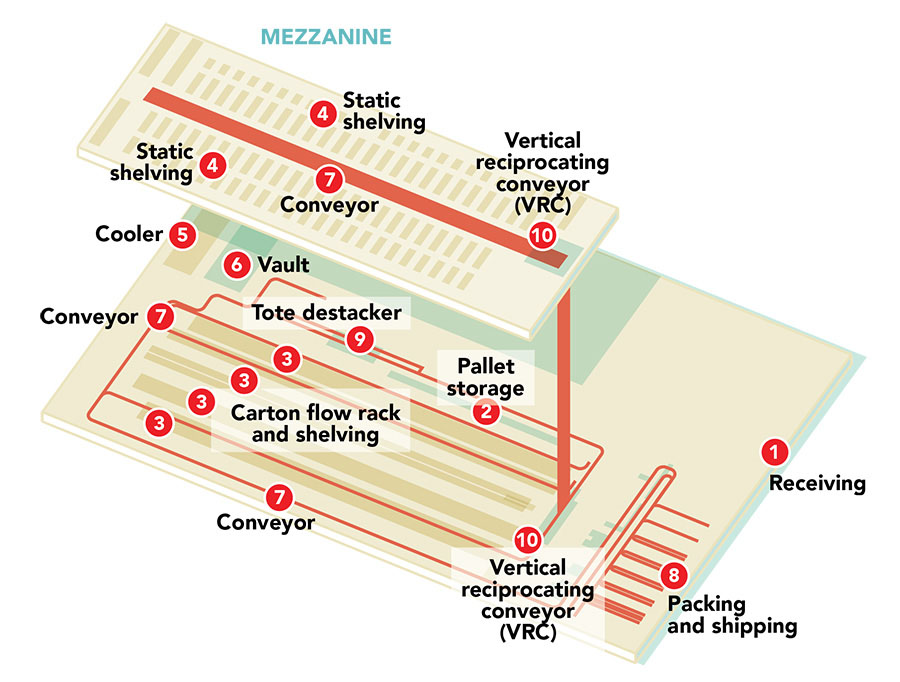
在位于纽约州罗彻斯特的配送中心,一个移动拣件机器人在专门处理慢速产品的夹层上加强了语音指挥的拣货操作,而快速产品则在一楼的货架和托盘上拣货。
接收
接收(1)发生在白班期间。该设施接收混合的病例——从来没有完整的病例——以及病例、分裂病例和每个交付的病例。根据系统中已有的采购订单,对所有到货进行扫描。
存储
入库是系统指示的。该设施有一个小区域的托盘存储(2)。其余的库存储存在箱子或项目水平的纸箱流架和货架(3)在地板层和夹层层的静态架子上(4)。对温度敏感的物品存放在一个小冷却器中(5)而限制处方药,如麻醉剂,则存放在安全的保险库中(6)。托盘准备储存,或托盘内置接收,交付到托盘存储位置(2),通过条形码扫描或语音确认。纸箱或单独的物品,如手杖,轮椅和助行器收到车牌条形码标签,可以放在一个放好车和交付到存储位置(3、4、5、6)。缓慢移动的物品被运送到夹层(4)在垂直往复输送机上(10)。
挑选
工厂里有几个不同的采摘过程。
- 完整案例挑选:订单选择器在桌面计算机屏幕上确定他们要挑选的箱子数量,系统打印出运输标签。然后,他们被语音引导到托盘存储区域的拾取位置(2)根据最有效的路径来选择这些情况。箱子被挑选到手推车或对讲机上的托盘上,并应用运输标签。然后将它们导入传送带(7)并被分类到包装和运输区域的运输位置(8)基于路由。
- 选择可退回的手提袋:发送到各个商店的可回收手提袋可能会从位于设施内的不同取货区接收库存。当从手提袋脱粒器中导入一个手提袋时,该过程在底层启动(9)在传送带上(7)。当输送机(7)将手提袋送到一个楼层拾取区(3)助手扫描袋子,语音系统发出代码,识别下一个袋子的存储位置和数量。一旦同事确认了该区域的所有采摘,手提袋就会被推回到传送带上(7)然后前往下一个拾取地点(3)在地板上,这个过程是重复的。一旦袋子里的所有物品都在地面上被挑选出来,VRC(10)将手提包提至夹层(4)在这里,移动缓慢的物品被存储在静态架子上,以及地板上没有可用空间的物品。订单选择器在中间层遵循类似的过程。当一个手提袋到达他们的区域时,他们扫描一个标签,然后被引导到挑选地点,在那里他们挑选一个手持容器,然后将其倒入运输手提袋中。然后将手提袋导入传送带上。然后被送到运输和包装区(8)。
- 移动机器人拣片也发生在夹层(4)。目前,该过程模拟了通过订单选择器进行挑选。当一个运输包到达时,机器人操作员会扫描包。然后将订单信息传递给移动机器人。机器人移动到一个取货地点,并自动从架子上取货到机载集装箱。如果需要再次拾取,机器人将被引导到下一个位置并重复该过程,直到它在其区域内拾取了所有需要的物品。然后,它返回给机器人操作员,后者将手提袋中的内容物倒入运输手提袋,并将其导入夹层传送带。然后被送到包装和运输区域(8)。然后,操作员扫描该区域的下一个手提袋,并再次开始该过程。
航运
在运输过程中(8)在美国,客户的订单被分成几批,装上托盘,装上卡车,送到快递公司的目的地。快递员将订单分解为最后一英里的送货服务。
系统供应商:
- 移动拣件机器人:我的机器人
- 输送机:Hytrol和SSI Schaefer
- 垂直往复输送机:PFlow行业
- 语音识别系统:卢卡斯系统
- 移动计算与条码扫描:斑马技术
- 世界媒体峰会:内部开发
- WCS:SSI Schaefer
- 可退回的运输手提袋:Monoflo国际
- 内联印刷:柯尼卡美能达
- 打印和应用运输标签:韦伯包装
- 叉车供应商:丰田
- 架:Ridg-U-Rak

文章主题
物流最新动态
卡斯货运指数(Cass Freight Index)显示,3月份的货运和支出数据将下降 多式联运运量在第一季度结束时下降幅度更大 UPS预计第一季度收益下降,原因是业务量下降和宏观经济状况 据EIA报道,4月24日当周,全国柴油平均价格下降 “一个黄”的业务变更现在将在黄色国家总货运谈判中解决 PMA-ILWU谈判似乎取得了进展的迹象 FTR的卡车运输状况指数受到运费和货运量下降的影响 更多的物流作者简介
m.mxappadg订阅《物流管理》杂志万博2.0app下载

2023年3月
万博2.0app下载

我们采访了一些物流专家,了解他们对电子商务对全国货运的总体影响的看法。有一件事是肯定的:目前的流失水平和速度已经不可逆转地改变了许多人已经习惯的管理模式。













